Prediction uncertainty-aware Planning
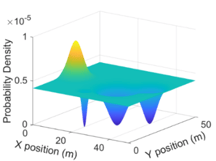
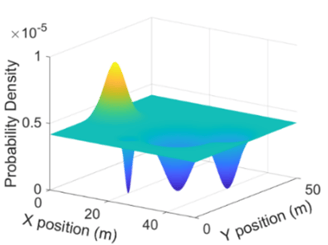
Uncertainty-aware social navigation among 15 pedestrians. Probabilistic neural network predicts the future trajectory of surrounding pedestrians with associated uncertainty which is incorporated as constraints using control Barrier Function (left) and chance-constrained (right) MPC for safe robot navigation.
CBF (Left) and Chance-constrained (Right) for collision avoidance in social navigation.
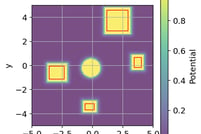
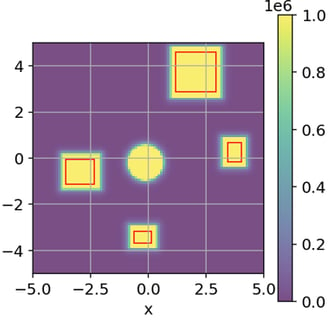
Learning based control using APF NMPC
Neural network learns high level policy and outputs control based on the current robot state and artificial penitential field (APF) based cost map.
Human-like upper limb motion Generation
Model predictive control (MPC) is used to minimize total effort and ensure smoothness for simultaneous reaching and orientation tasks mimicking human-like upper limb motion. Performed hyper parameter optimization to obtain optimal weights for generating motion for a 7-DOF 3-link human arm model.
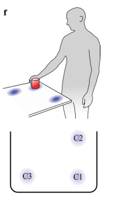
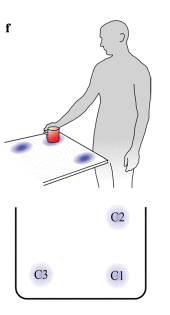
Task: Lift a cup from C1 to face. Model could replicate actual human motion.
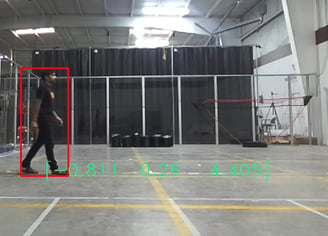
Cooperative Trajectory Forecasting under Occlusion
Reliable tracking and prediction of occluded dynamic object has been achieved through an end-to-end network that performs simultaneous pose recovery and applies rigid body transformation to estimate pedestrian in occluded camera's reference which is further utilized to predict future states of the occluded object with safety guarantees.
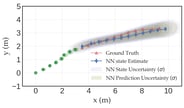
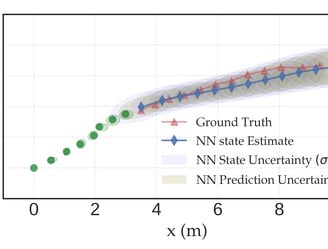
Uncertainty-aware Trajectory Prediction
In this work, we propose an algorithm that can take uncertainty during sensing and propagate that uncertainty into the future trajectory prediction of traffic agents. The algorithm uses deep ensembles to capture both data and prediction uncertainty which can be passed downstream for robust path planning.

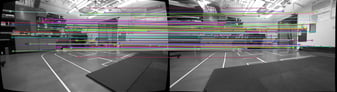
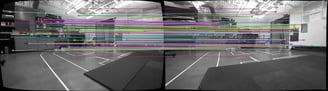
Cooperative Perception in connected vehicles
Established feature-based relative pose estimation between two connected vehicles to obtain the orientation and translation between vehicles. Compared feature descriptors like SIFT, SURF, ORB, KAZE, and AKAZE for efficient pose estimation.



Probabilistic RRT for path planning
Unlike the traditional RRT where samples are uniformly distributed, probabilistic-RRT induces biased sampling based on the goal and obstacle positions in time. The goal has a higher sample distribution while obstacles have very low samples. This ensures faster collision-free path towards goal.